Characteristics
- Destination:
- planetary research
- Status:
- decommissioned
- Research Object:
- Moon
- Launch Date:
- November 10, 1970
- Spaceport:
- Baikonur
- Launchers:
- Proton-K with D upper stage
- Machine Weight:
- SC mass: 5700 kg; Lunokhod-1 mass: 756 kg
- Working Orbit:
- Moon flight
- Active Lifetime:
- the spacecraft operated successfully for 10,5 months
Description
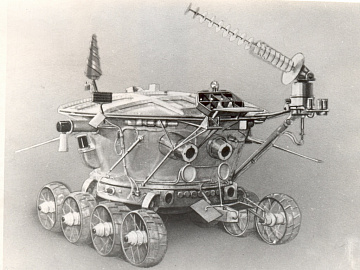
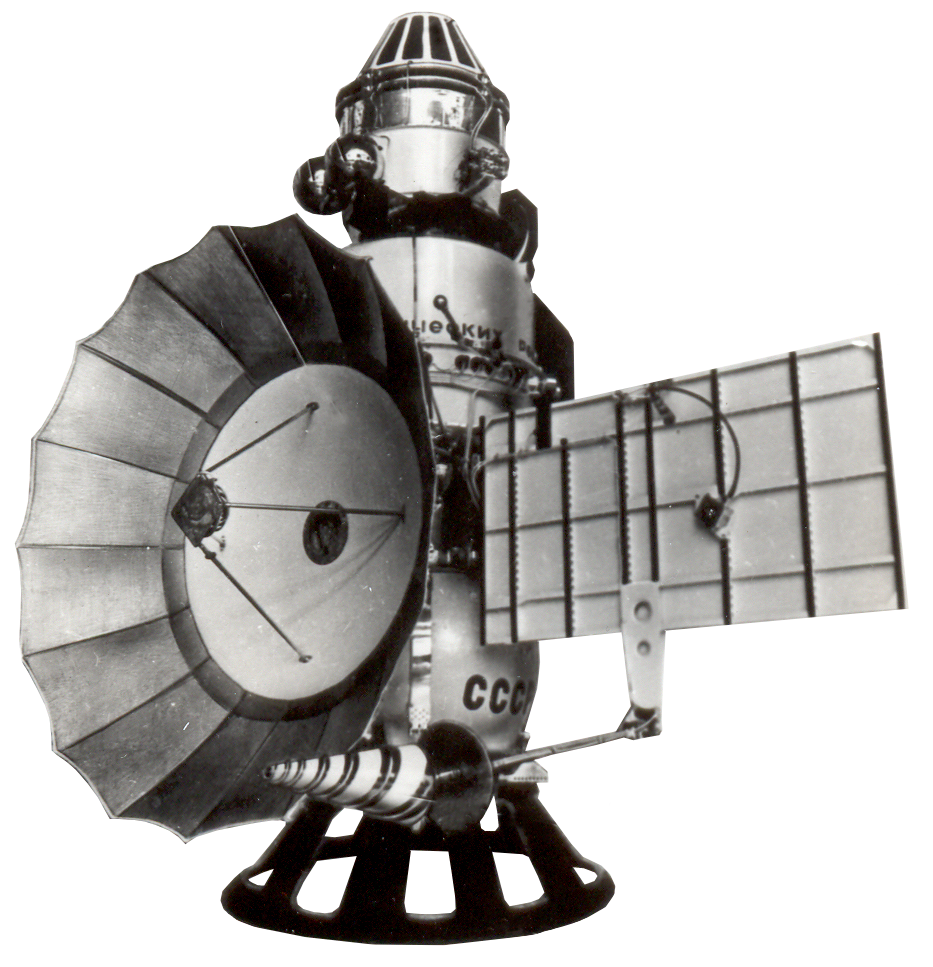
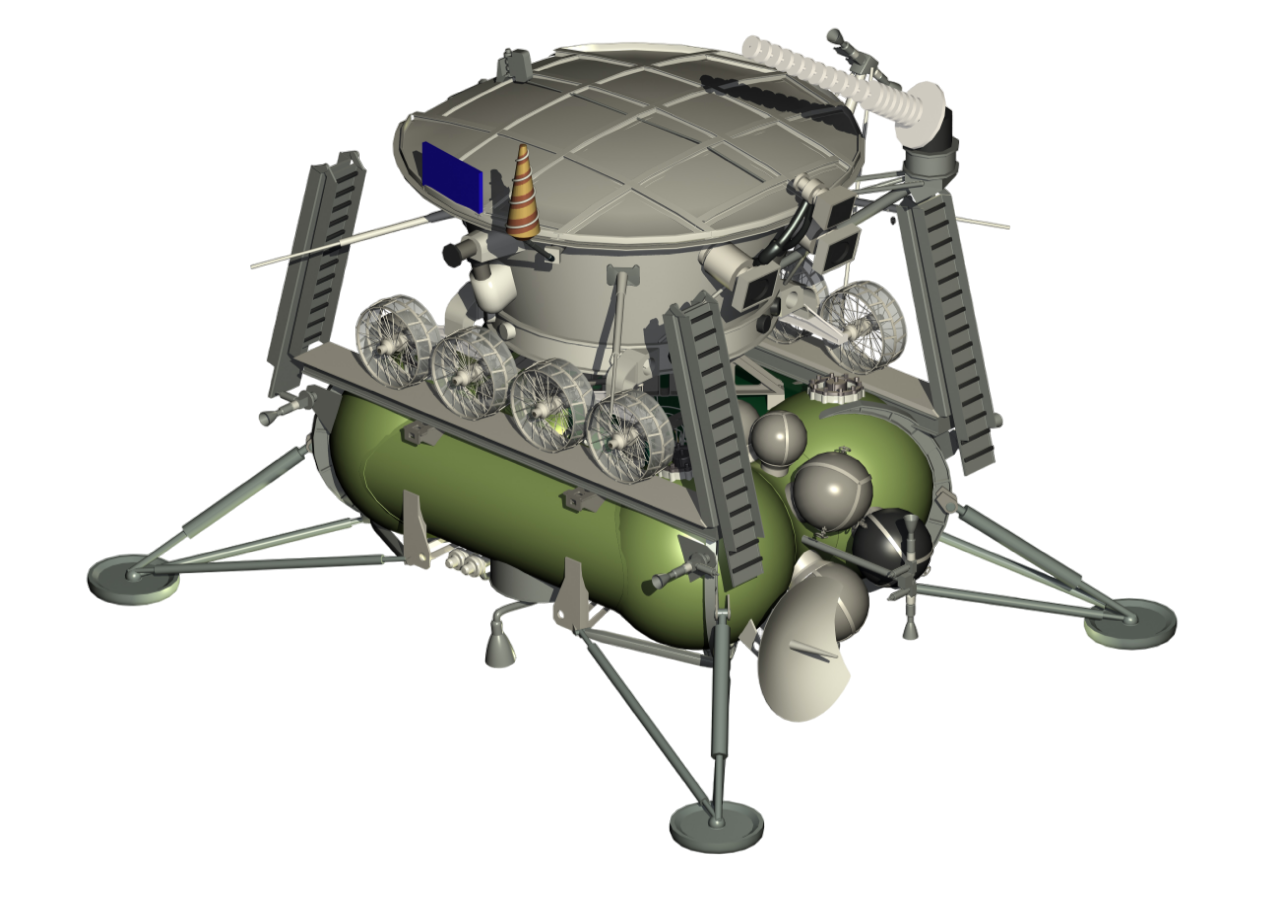
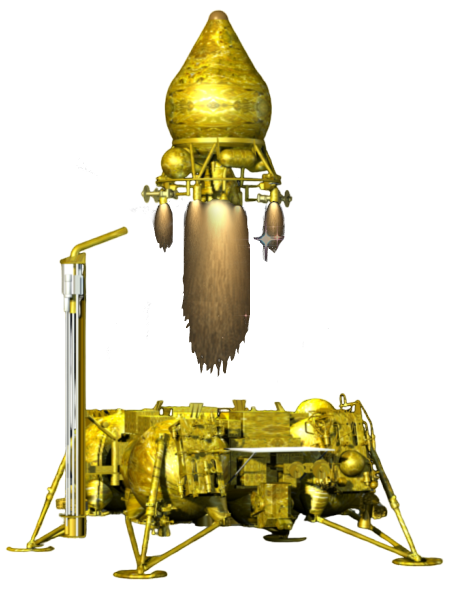
1The Luna-17 spacecraft delivered the Lunokhod-1 self-propelled vehicle to the Moon to conduct scientific research on the lunar surface.
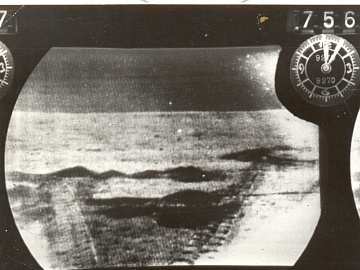
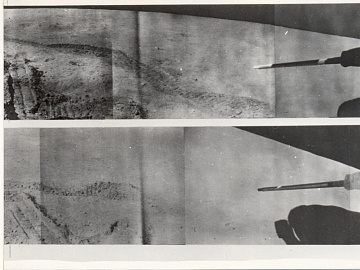
Lunokhod-1 passed a distance of 10,540 meters and transmitted 200 telephotometric panoramas and about 20 thousand small-frame TV images to the Earth. During the survey, stereoscopic images of the most interesting features of the relief were obtained, allowing for a detailed study of their structure.
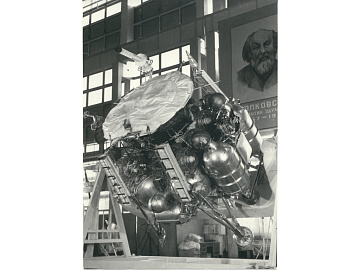
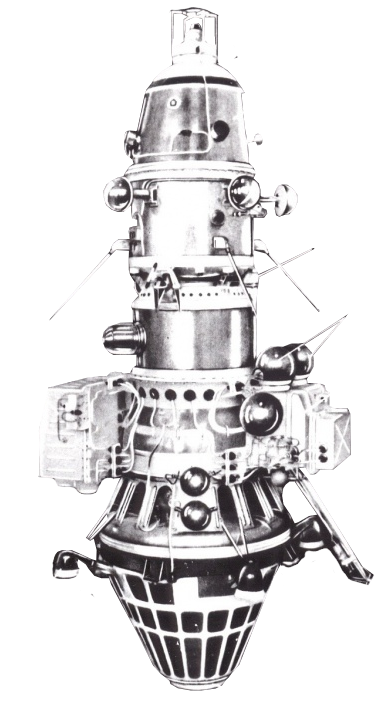
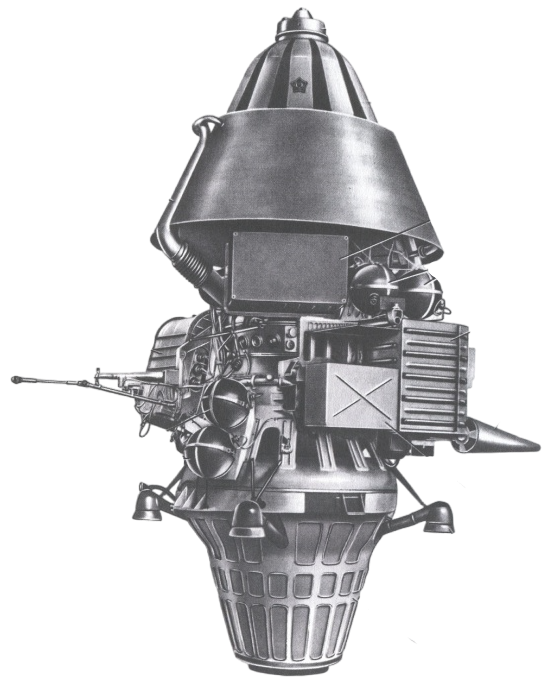
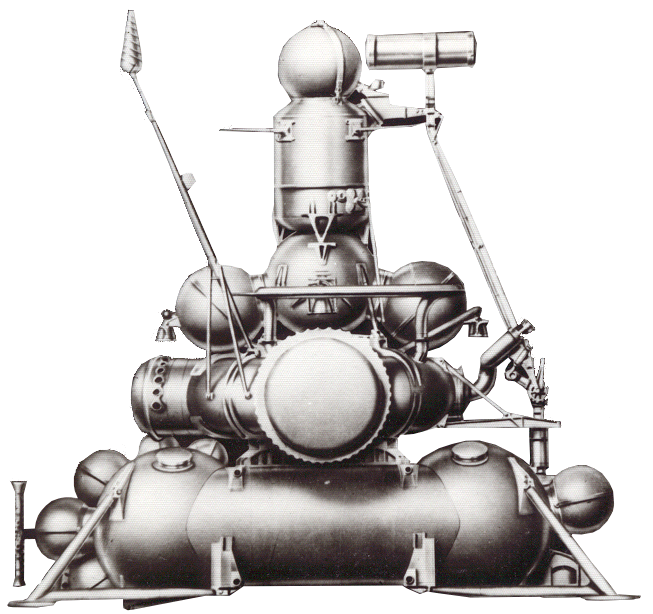
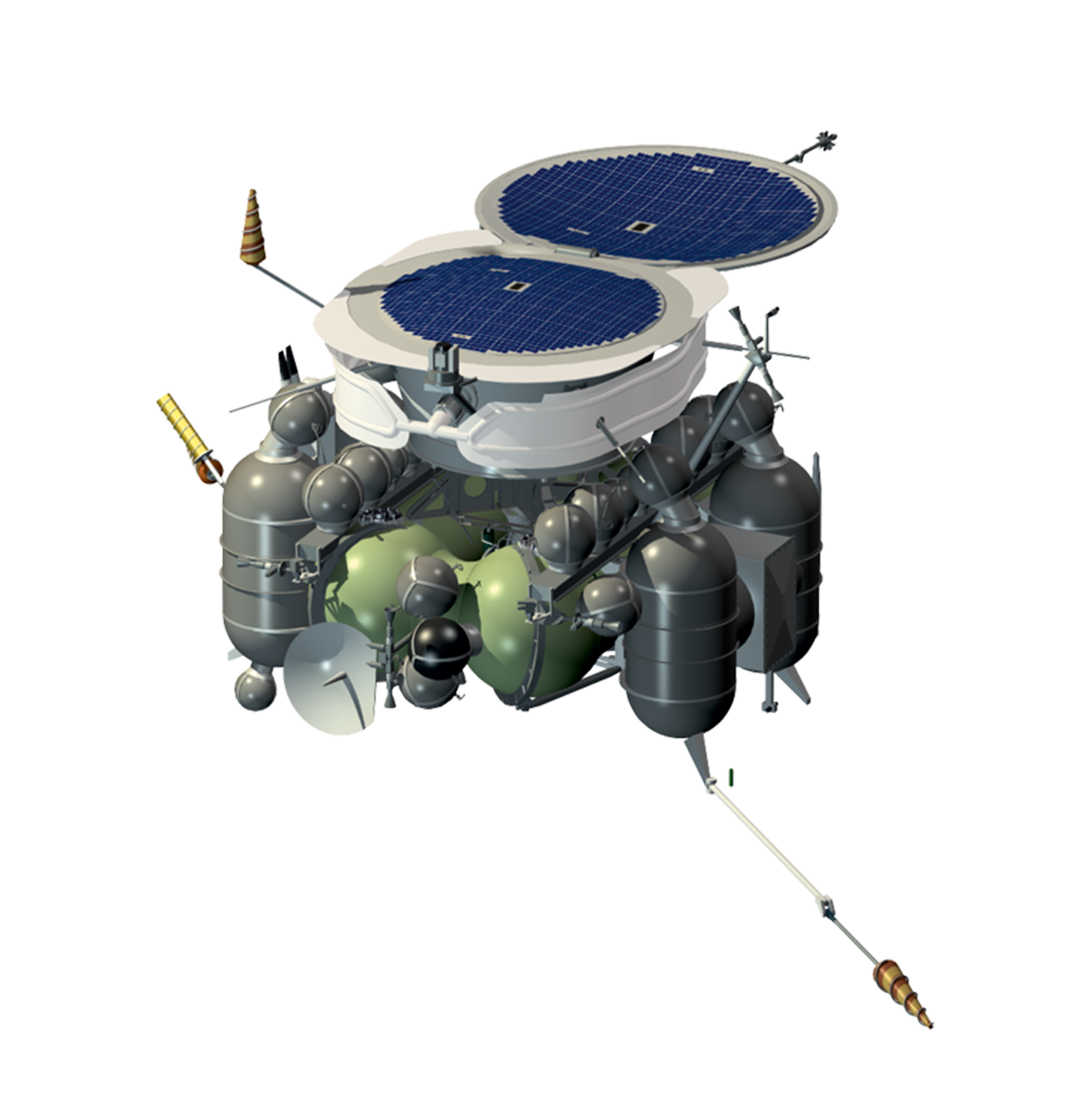
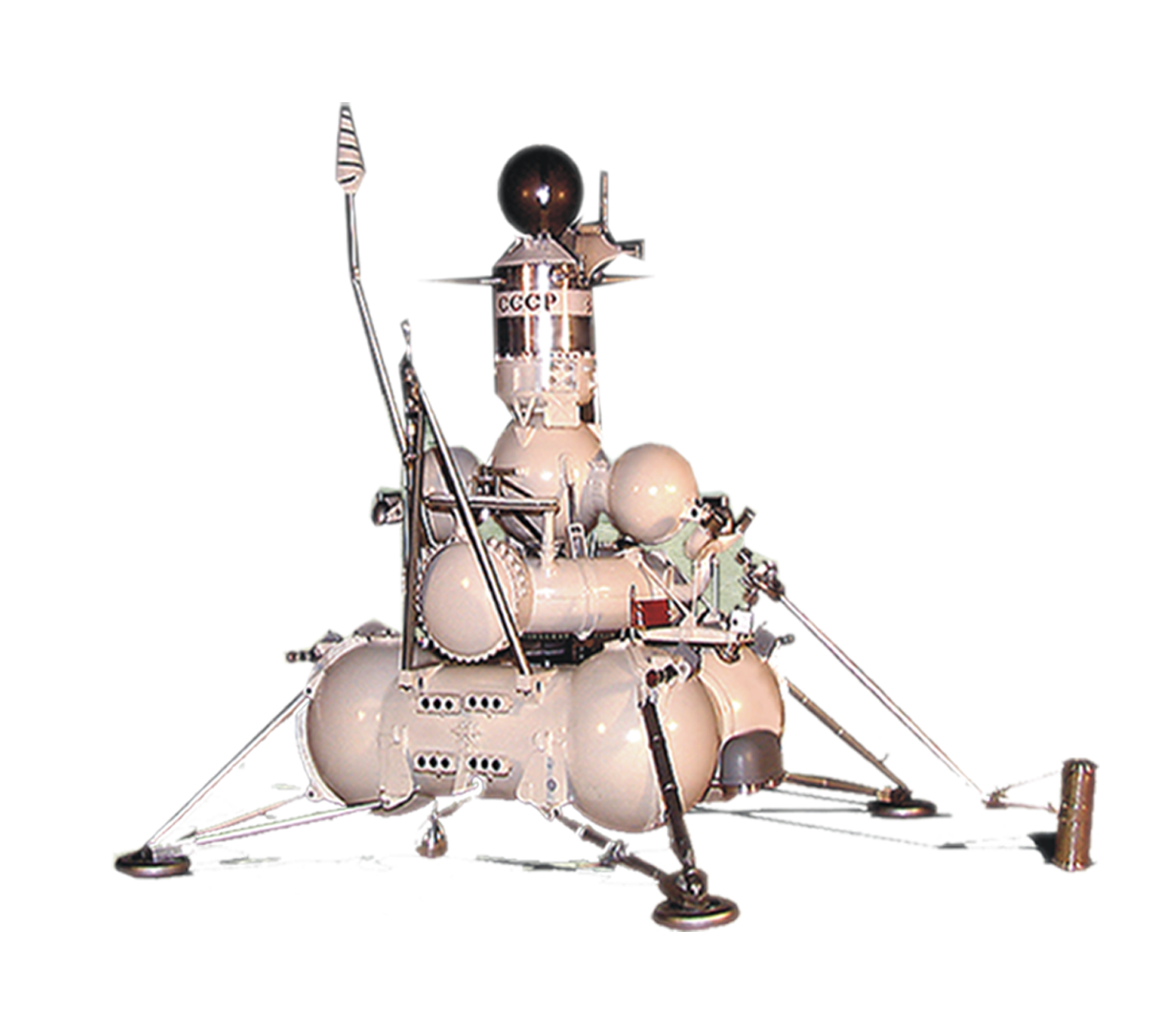
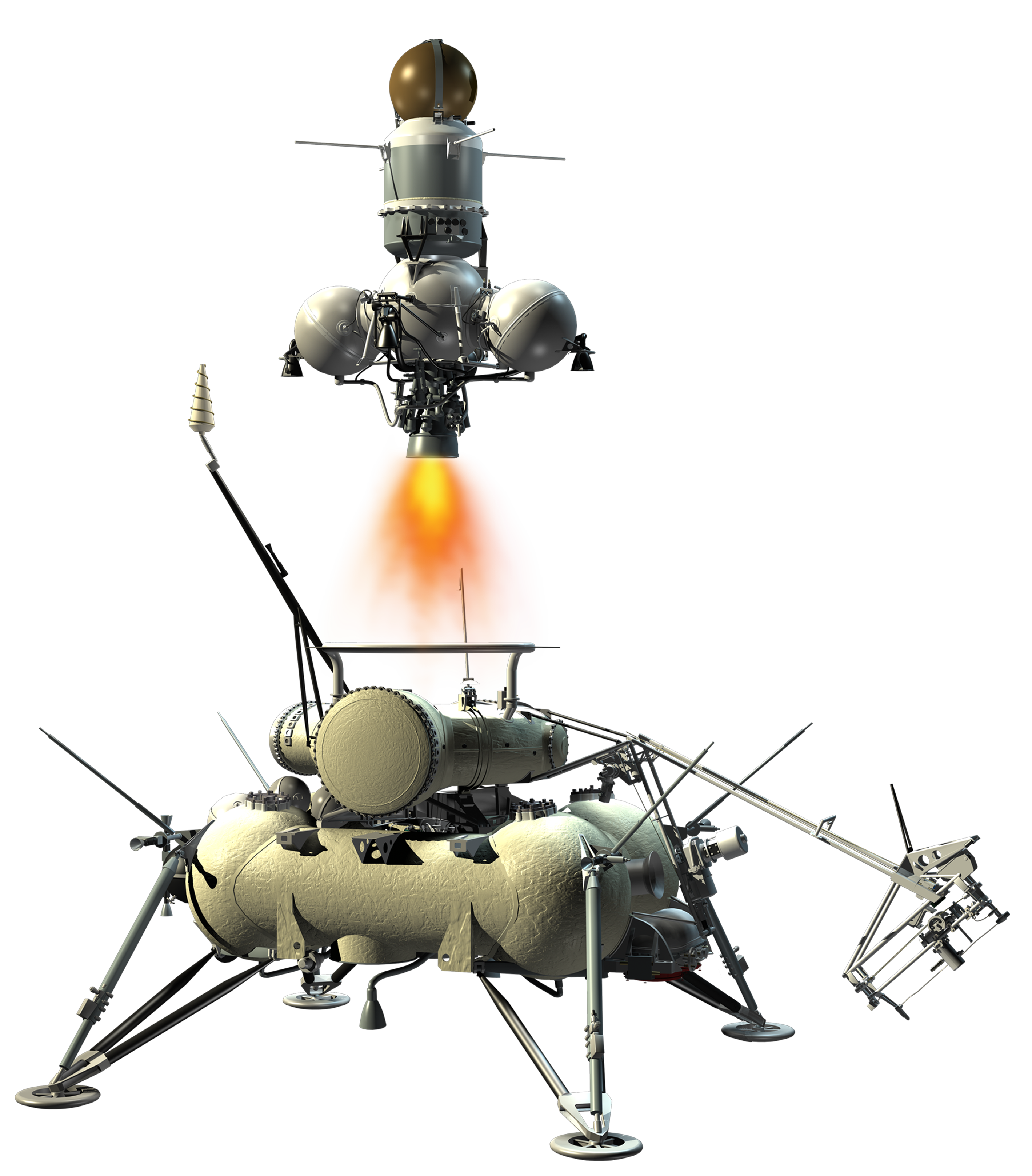
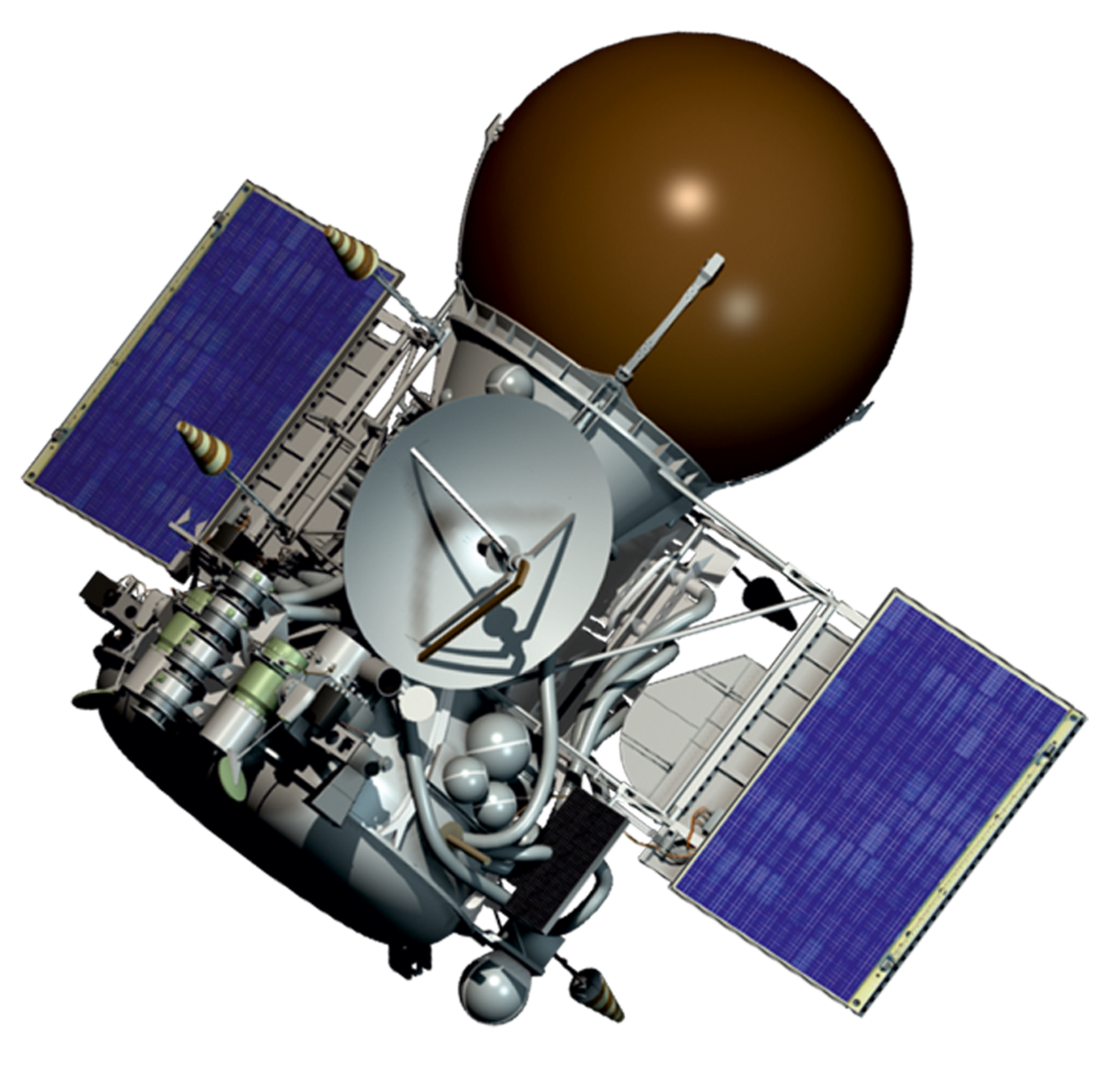
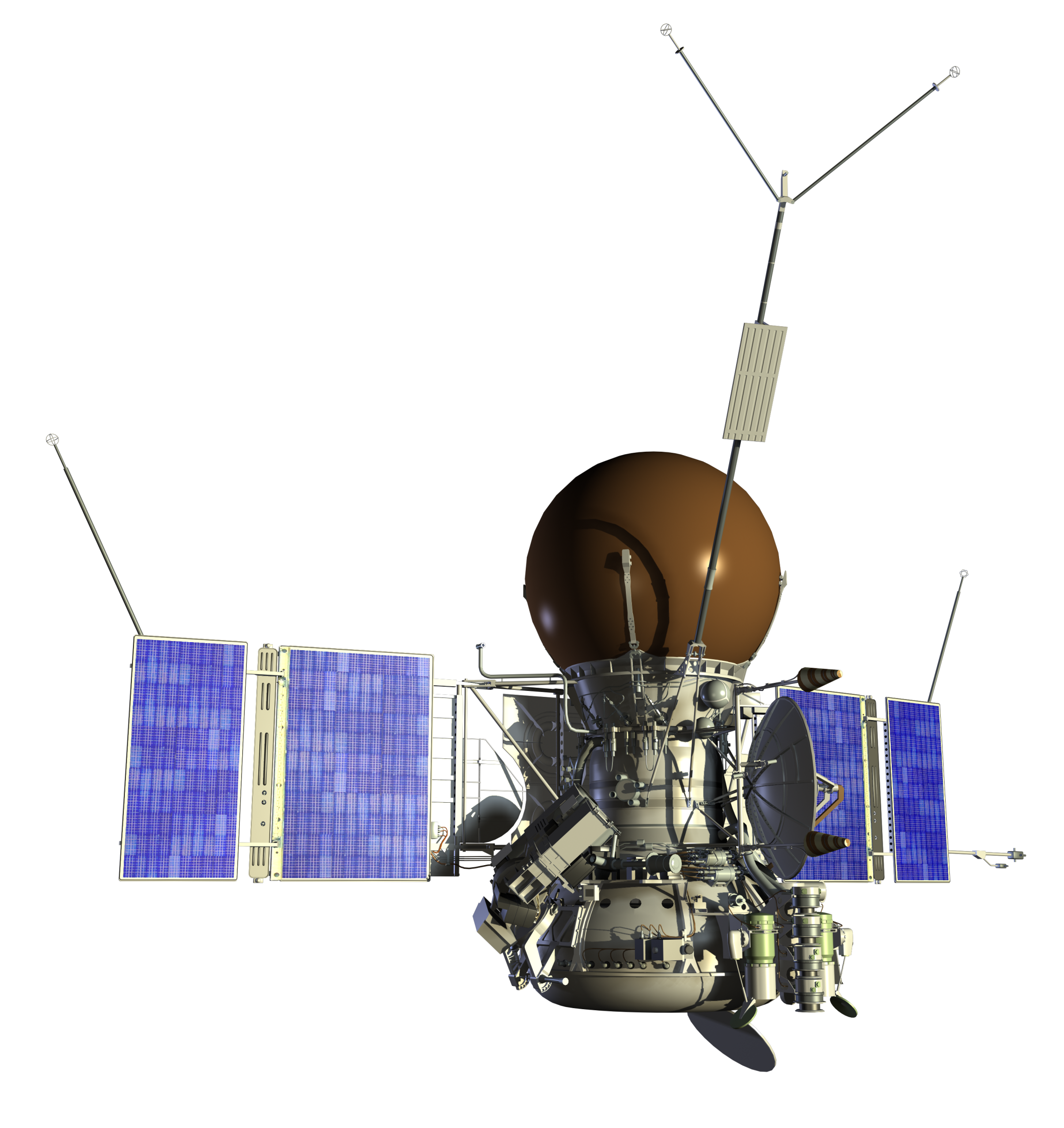
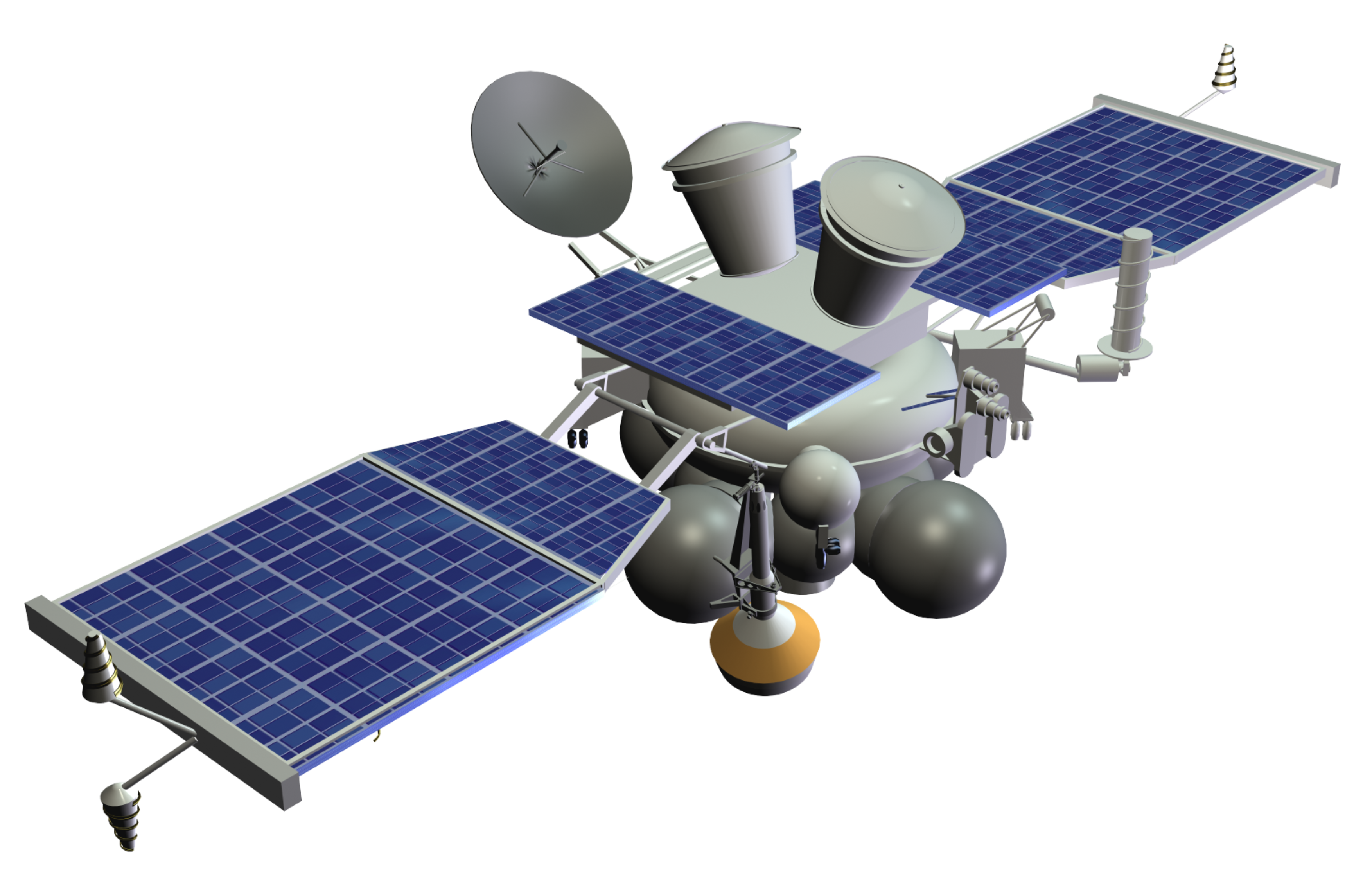
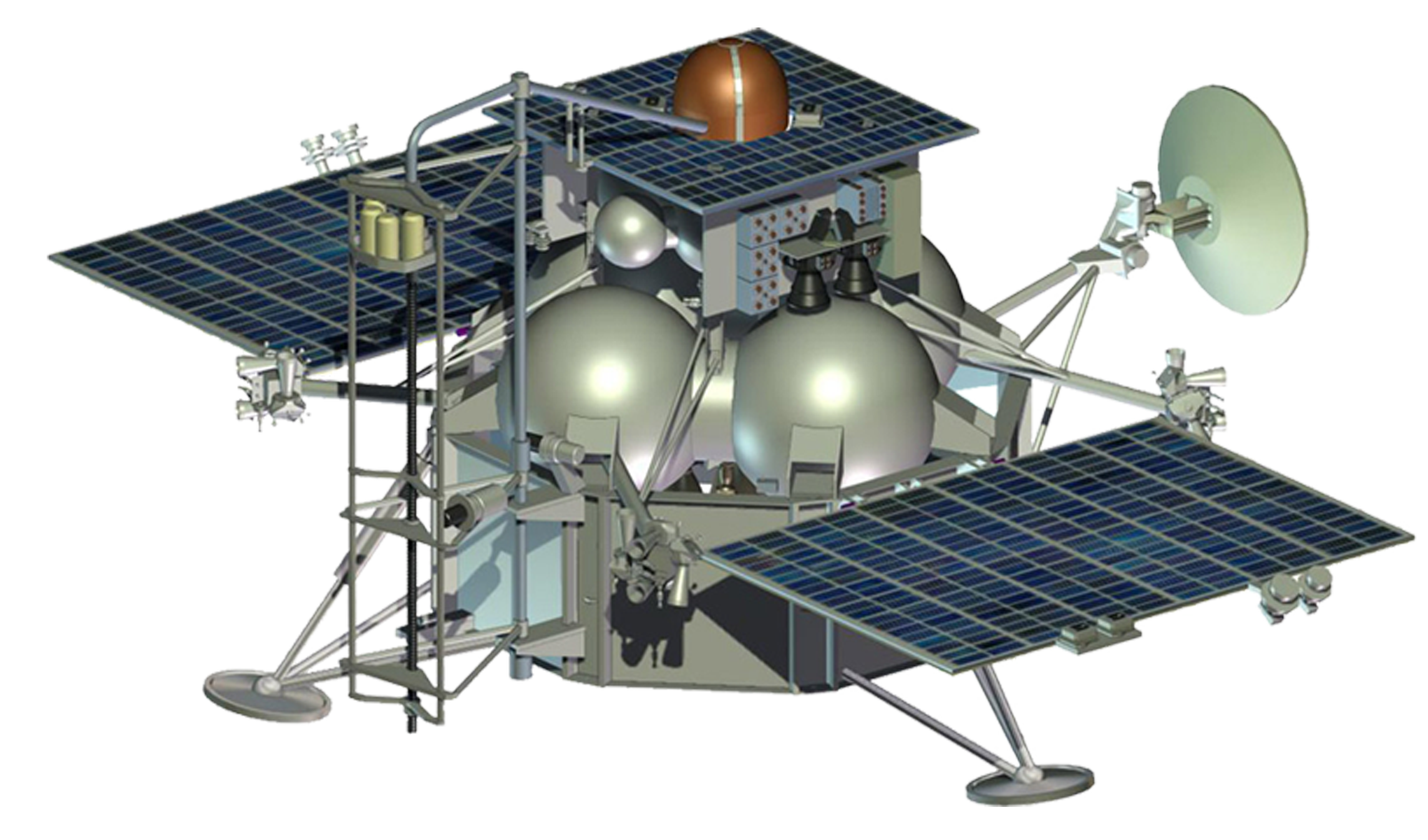
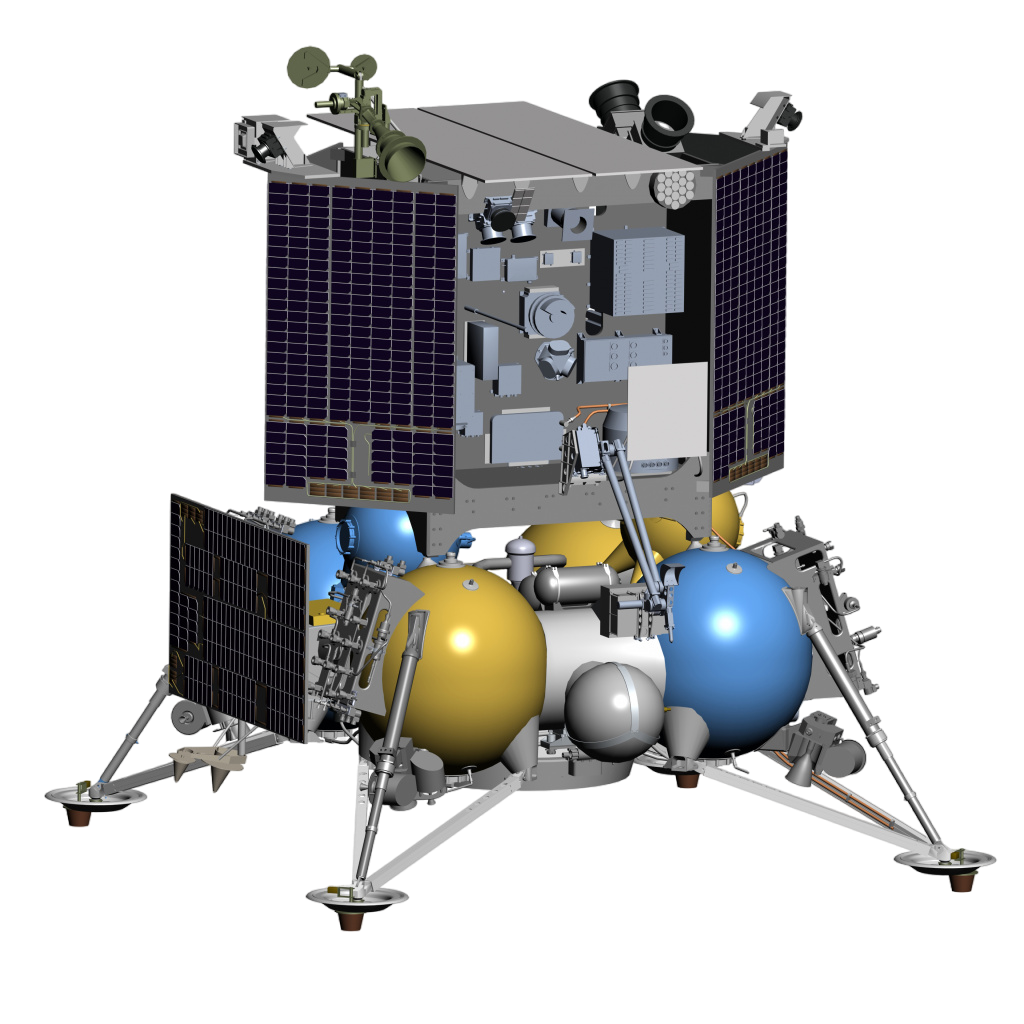
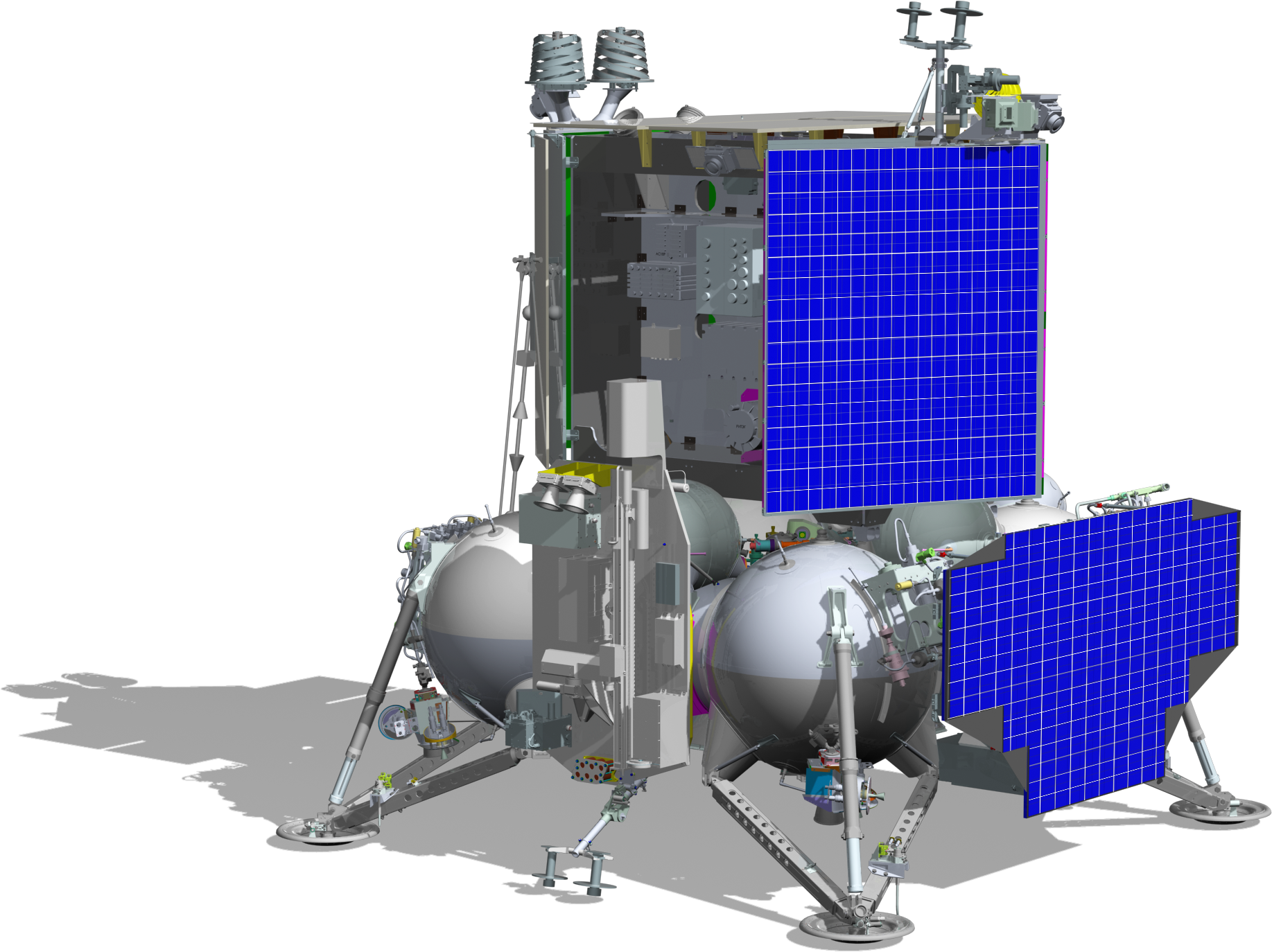
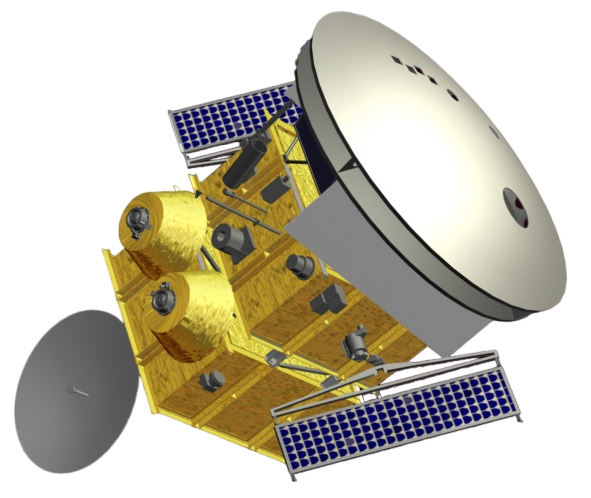
The automated spacecraft composed of a corrective braking module and a self–propelled vehicle. The corrective braking module was designed to provide the Earth–Moon flight, including: trajectory corrections, entering the Moon artificial satellite orbit, forming a pre–lunar orbit, de- orbiting and landing on the lunar surface.
The design of corrective braking module based on four spherical fuel tanks interconnected by cylindrical spacers, two of which served as instrument compartments for the flight and landing control system equipment. A part of the control system equipment designed to control the operation of D unit was located on transfer frame.

In addition to the main tanks the jettisonable compartments’ tanks were filled with propellant. The compartments were jettisoned prior to the engine firing aimed at deorbiting from the Moon artificial satellite orbit. The corrective braking module propulsion system consisted of main engine with adjustable thrust and low–thrust engine unit with a nominal thrust of 280 kg. The total thrust of the engine could vary between 1929 — 750 kg..
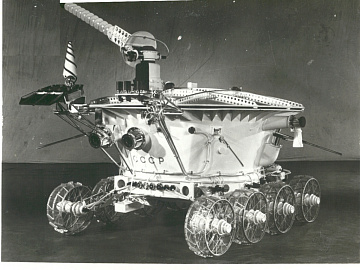
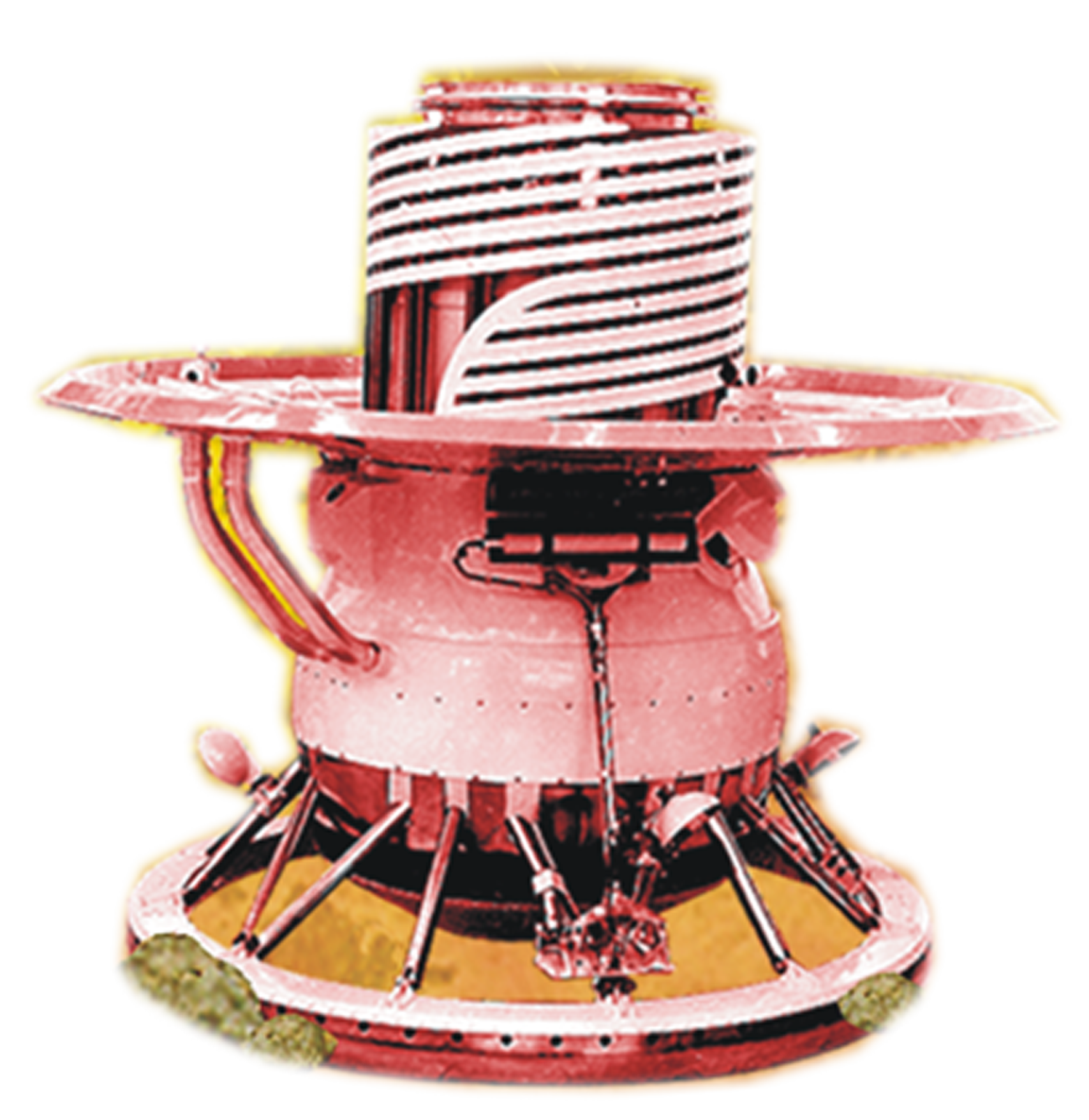
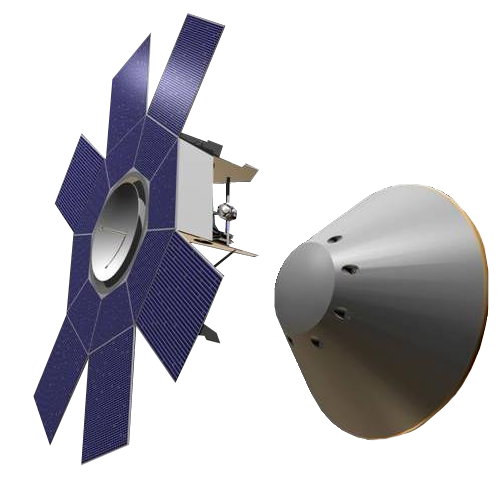
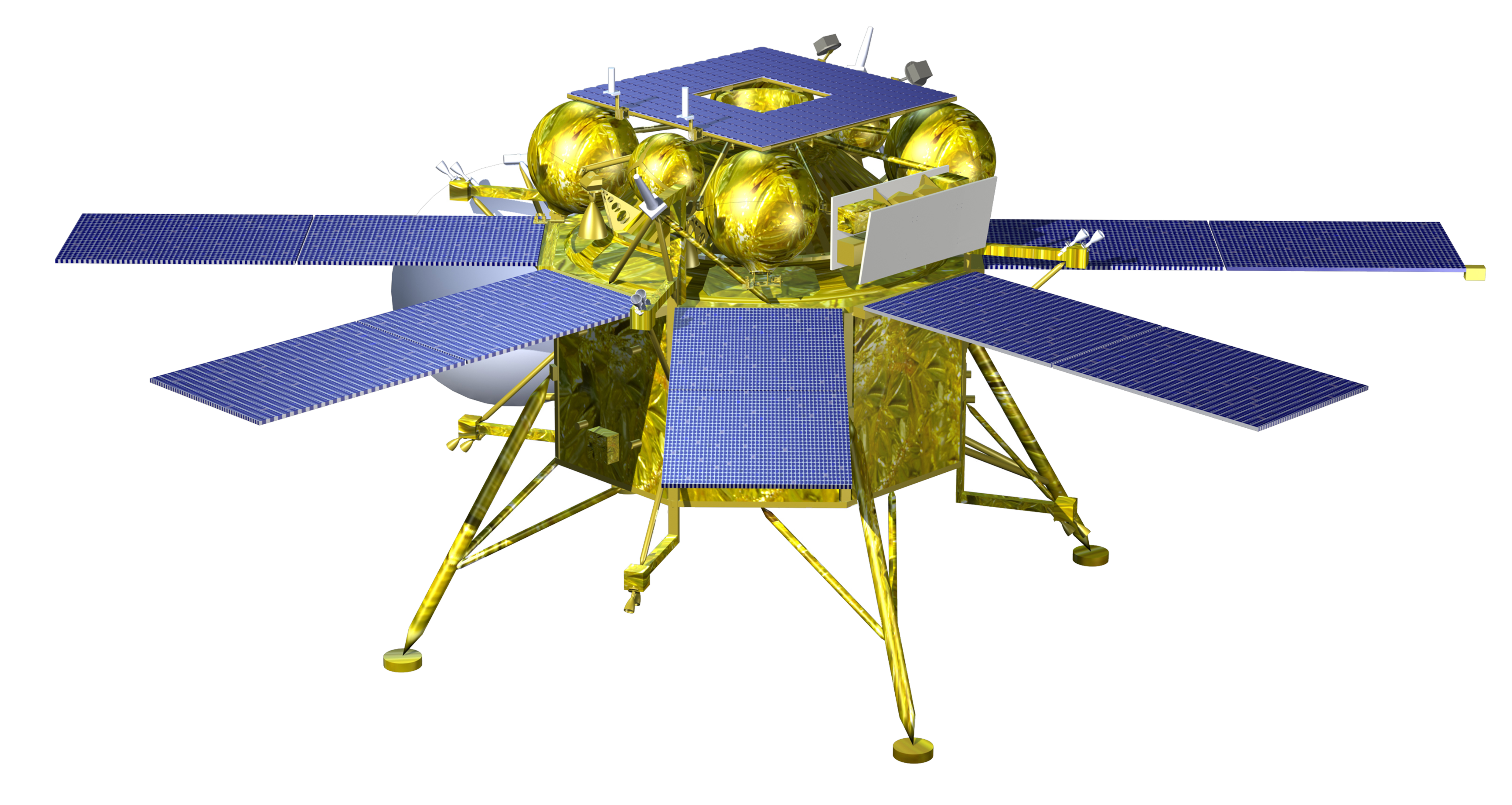
The Lunokhod-1 automated self-propelled vehicle was installed on the landing platform
composed of two main parts: a wheeled chassis and a sealed instrument container, carrying all
the housekeeping equipment. The container had the truncated cone shape and the upper base of
the cone, acting as a radiator-cooler for heat discharge, had a larger diameter than the lower one.
During the moonlit night, the radiator was covered with a lid.
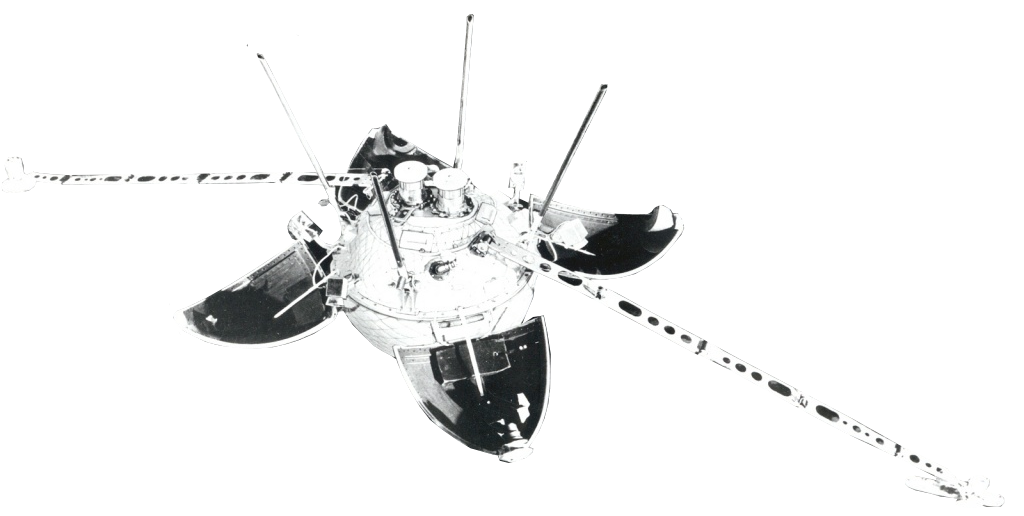
The lid’s inner surface was covered with solar cells ensuring the battery recharge during the
lunar day. In the operation position the solar panel could be positioned at different angles within
0-180 ° in order to optimally use the Sun energy at its various heights above the lunar horizon.
In the front part of the instrument compartment there were portholes for television cameras, an
electric drive of a movable pointed antenna designed to transmit television images of the lunar
surface to Earth, a low-directional antenna that received radio commands from Earth and
transmitted telemetry data, scientific instruments and an optical angle reflector.
The television complex designed to obtain data on the space surrounding lunar rover included a small-frame television system designed to obtain images of the lunar surface required for operational motion control and a photo-television system.
A telephotometric or phototelevision optical-mechanical system equipped with the four-cameras panoramic scan was installed on board the lunar rover in order to obtain panoramic images and survey the stellar sky sections, the Sun and the Earth needed for the lunar rover astroorientation that did not require high image transmission speeds. They were arranged in such a way that two of them provided mapping to the right and left of the lunar rover within slightly more than 180 °
in the horizontal plane and 30 ° in the vertical, and the other two cameras gave the terrain and space image within 360° in the vertical and 30 ° in the horizontal planes.
Two panoramic telephoto cameras and four pin antennas were installed on the left and right
board sides (in each pair one of the cameras was structurally combined with a local vertical
determinant).
In the rear part of the instrument compartment there was a radioisotope heat source and next to it there was a device for determining the physical and mechanical properties of the lunar soil (a passability assessment device — PROP) and a mechanism for lifting and lowering the ninth wheel.
The instrument compartment was mounted on an eight-wheeled chassis ensured the movement
of the automated laboratory on the Moon surface. The geometry of the chassis, specific pressure
on the ground, traction characteristics of the chassis, parameters of the elastic suspension and the
design of the support surface of the wheels allowed to move confidently on a surface with a
loose, loose layer of soil, overcome steep ascents, move over craters and obstacles or ridges of
stones commensurate with the dimensions of the chassis. Each wheel had three titanium rims
covered with a stainless-steel mesh and connected by ground hooks. The wheel hub was
connected to the rim by spokes. Wheels, transmissions and engines were combined into single
units — motor–wheels. The Lunokhod had eight motor wheels, each of which was a leading one.
All wheels were non-rotating relative to the vertical axis. Therefore, to turn the lunar rover in
place, each four wheels were rotating in the opposite direction, or in one, but at different speeds.
The diameter of each of the eight driving wheels on the ground hooks was 510 mm, width 200 mm. The wheelbase of the chassis was 170 mm, and the track width was 1600 mm.

A radioisotope heat source containing polonium-210 ampoules provided a specified thermal
environment inside the hermetic container during the lunar night. A two–circuit air temperature
control system provided heat relief during the lunar day through the upper bottom of the
instrument compartment, which simultaneously served as a radiator cooler. A special thermo-
optical coating consisting of mirror elements made of quartz glass was applied to its outer
surface. To reduce the heat outflow from the instrument compartment through the radiator cooler
during the lunar night, it was closed by a heat–insulated lid equipped with solar panel
photoconverters on the inner surface. A water evaporator was used for additional cooling of the
gas in the most heat-stressed sessions.
Lunokhod was remotely controlled. The remote-control system included a course guidance system that transmitted the vehicle’s angular position data to the Earth. In addition, the course gyroscope ensured Lunokhod’s movement in a given direction detouring obstacles.
A cross-country assessment device (PROP) was installed as a part of self-propelled chassis on the Lunokhod stern in order to obtain data on the road conditions required to control its movement, data on the distance traveled and data required to conduct scientific experiments to study the properties of the soil. It consisted of a dimensional (ninth) wheel and mechanisms for embedding and turning a stamp in the ground, enabling to obtain data on the lunar soil physical and mechanical properties. The distance traveled was determined by means of a measuring wheel.
In addition, a lunar vertical sensor was installed on the Lunokhod represented by a bowl with a spherical inner surface on which the ball rolled freely.
The control of the self–propelled vehicle from the Lunokhod Control Center was carried out by the crew, which included the commander, driver, navigator, operator and flight engineer. Upon receipt lunar television images and telemetry information on Earth the Lunokhod crew provided commands to the Lunokhod by means of a special control panel.
The spacecraft launch mass was 5,700 kg, after entering a selenocentric orbit it was 4,100 kg, and on the Moon surface it was 1,900 kg. The total mass of the Lunokhod was 756 kg, its length with a deployed solar panel cover was 4.42 meters, width 2.15 meters, height 1.92 meters. Its design lifetime was 3 months on the Moon surface.
Flags and pennants with the image of the USSR State Emblem and the bas-relief of V.I. Lenin were placed on Lunokhod-1 and the Luna-17 landing platform.